Adding Replanning
Previously, we have only used control node (Sequence) and action nodes (ComputePathToPose and FollowPath). Now we will need to leverage decorator and condition nodes.
Keep Replanning the Path
Start Groot and open your existing bt_simple_nav.xml file. Change the Sequence control node for a PipelineSequence control node. As the robot is navigating, the FollowPath node will return RUNNING, we can use this time to check if a new path needs to be computed given the {goal} variable. If we kept checking the path planning on every tick, we would likely bog down the system (computationally speaking), so we can use a RateController decorator node to limit ticks to a set rate. We will pick 2.0 Hz for this example.
Note
The PipelineSequence control node is similar to a normal sequence control node, however, if another leaf is RUNNING it reticks the previous leaves in the sequence. You can learn more on the pipeline sequence docs.
The behaviour tree should now look something like the image below. The ComputePathToPose action node will be called every 2.0 Hz if FollowPath is RUNNING. Overwrite your existing bt_simple_nav.xml file with this new tree.

Build and source your workspace, and start the launch file.
cd ~/MY_ROS_WS
colcon build
source install/setup.bash
ros2 launch bt_demos bt_demo.launch.py
After giving the robot a goal pose, you should see the path being constantly replanned (at a rate of 2.0 Hz). If a subsequent goal is given, then the path is recomputed and takes into account this new goal pose.
In a sense, we have completed our objective to have the path update if a new goal is given whilst enroute, but we can make it a bit more elegant.
Trigger Replanning of the Path
Instead of constantly asking the path planner to recompute a path, let’s instead only ask when a new goal is given. When a new goal is given, the GlobalUpdatedGoal condition node will return SUCCESS, sounds like something we can leverage.
We still only want to replan if the FollowPath action node is RUNNING, so we can keep the PipelineSequence but modify the ComputePathToPose portion to happen in the event of a new goal.
A Fallback control node will work nicely in this instance. A fallback node will only move onto the next leaf if the first one fails. If we make the first leaf a check that a new goal has been given, then we can move on to planning a path.
The GlobalUpdatedGoal will only return a SUCCESS with a new goal, therefore, we need to convert that into a FAILURE to trigger the path planning. An Inverter decorator node solves this.
This likely all sounds confusing, so let’s take a look at the tree in Groot and figure out the conditions.

Let us breakdown the steps in this behaviour tree in the “normal” case (goal is given, the robot traverses to that goal).
A new goal is requested - start on the left hand side of the tree -
GlobalUpdatedGoalviaInverterreturnsFAILUREThis
FAILUREtriggers the Fallback control node to tickComputePathToPose- this returnsSUCCESSThe PipelineSequence control node moves over to
FollowPath, returningRUNNINGwhilst the robot is movingThe robot reaches the goal,
FollowPathreturnsSUCCESSand the behaviour tree is completed
Now let’s consider a replanning situation, where a new goal has been provided when FollowPath is returning RUNNING
The PipelineSequence still ticks the RateController whilst the robot is moving
Every 2.0 Hz, the fallback node is ticked
With no new goal,
GlobalUpdatedGoalvia theInverterreturnsSUCCESSand the fallback node returnsSUCCESSwithout moving on to theComputePathToPosenodeA new goal has been given since the last tick,
GlobalUpdatedGoalvia theInverterreturnsFAILURE, this triggers the fallback node to queryComputePathToPoseand a new path is calculatedAs
FollowPathuses the Blackboard variable{path}, this now reflects the new goal and the robot continues to navigate
Modify your bt_simple_nav.xml file to replicate the behaviour tree in the above image. You may use Groot or modify the xml tags manually. Build and source your workspace, and start the launch file.
cd ~/MY_ROS_WS
colcon build
source install/setup.bash
ros2 launch bt_demos bt_demo.launch.py
Running the simulation and giving the robot a goal, it will navigate to the goal but is not constantly replanning the path. Only if you give the robot a new goal whilst it is navigating will the system replan the path. This is much less computationally strenuous than our previous fixed rate replanning (imagine trying to calculate paths for a huge warehouse at a high rate!).
Recovery Behaviours
Recovery behaviours are meant to be called when the robot gets in trouble. The robot should stop trying to navigate, sort itself out, then try to carry on.
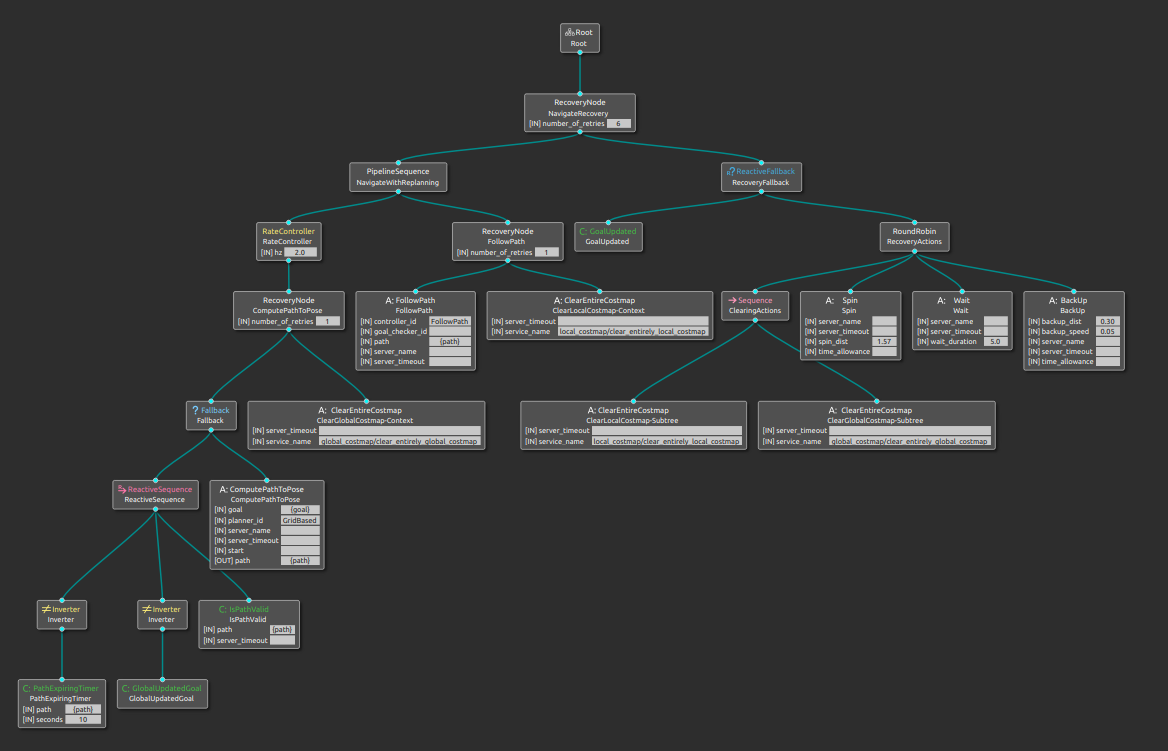
The image below is the nav_to_pose_with_consistent_replanning_and_if_path_becomes_invalid behaviour tree from Nav2. The left hand side of the recovery node called “NavigateRecovery” is essentially our simple replanning tree from above, with some additional checks (for example, in bt_simple_nav.xml it is assumed our ComputePathToPose will always succeed - not very robust).
The right hand side completely handles recovery behaviours. There are four primary actions the behaviour tree tries to take: Clear Costmaps, Spin, Wait, BackUp. The RoundRobin control node acts like a Sequence , trying them all in turn but has extra conditions. Once the right hand side returns SUCCESS the RecoveryNode will retry to perform the left hand side navigation. The recovery node is also slightly special, please reads the docs for more information.
By expanding trees, we can provide more intricate behaviours for our robots. They can take a fair amount of head scratching to read and to write, but the best thing is they are simple to modify and iterate upon.